Так увлекся процессом работы, что опять чуть не забыл вам показать промежуточные результаты 😅
Работа идет сразу по нескольким направлениям (↓ниже еще видосы↓).
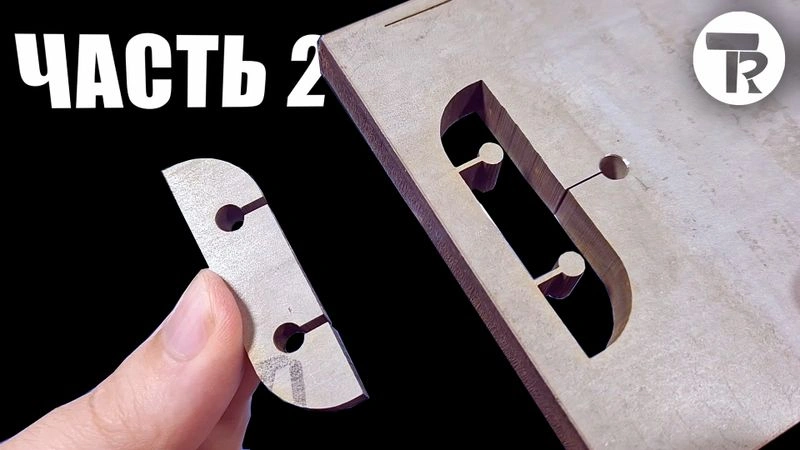
Во-первых, пока помнятся все нюансы, продолжаем делать электроэрозионный станок. Пришла мысля сделать систему продува места реза. Получилось довольно неплохо. Только сопла нужно подредактировать, чтоб вода не распрыскивалась так сильно.
Плюс, как я и думал, направленная струя очень хорошо помогает продевать проволоку в сопла. Так что может и не автоматическую, но автоматизированную заправку проволоки все-таки получится сделать.
Во-вторых, я почти закончил полубюджетную систему фильтрации и деионизации воды (не совсем бюджетная т. к. ее можно упростить и удешевить, но при этом она и не слишком навороченная как могла бы быть изначально… подумал будет перебор (-_-). Осталось только прилепить датчики, запустить и проверить ее.
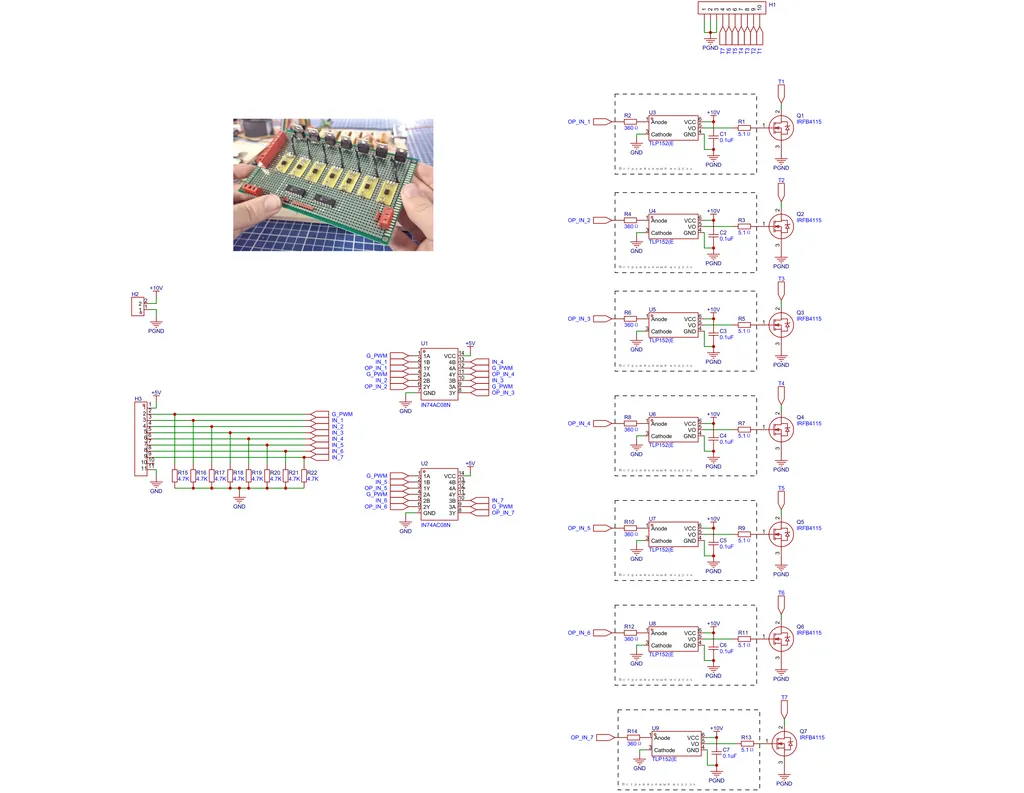
Ну и в-третьих, я хотел бы показать вам весь путь по созданию драйверов векторного управления BLDC/PMSM моторами для робособаки (как и обещал, хоть это и не в той же степени актуально как раньше). Начинал я их делать с практически нулевыми познаниями в электронике. И для меня это был больше обучающий проект. Может кому-то мой опыт тоже будет полезен.
Также идет усиленная работа по самой робособаке, ее я чуток переделал (и не один раз -_-). И по нескольким другим более сложным проектам. Но пусть для вас это пока будет сюрпризом :)
Попробуем потрогать на ютюбе настоящую науку. Не знаю, как сам ютюб на это отреагирует… Но какой смысл стоять на месте?
Так увлекся процессом работы, что опять чуть не забыл вам показать промежуточные результаты 😅
Работа идет сразу по нескольким направлениям (↓ниже еще видосы↓).
Во-первых, пока помнятся все нюансы, продолжаем делать электроэрозионный станок. Пришла мысля сделать систему продува места реза. Получилось довольно неплохо. Только сопла нужно подредактировать, чтоб вода не распрыскивалась так сильно.
Плюс, как я и думал, направленная струя очень хорошо помогает продевать проволоку в сопла. Так что может и не автоматическую, но автоматизированную заправку проволоки все-таки получится сделать.
Во-вторых, я почти закончил полубюджетную систему фильтрации и деионизации воды (не совсем бюджетная т. к. ее можно упростить и удешевить, но при этом она и не слишком навороченная как могла бы быть изначально… подумал будет перебор (-_-). Осталось только прилепить датчики, запустить и проверить ее.
Ну и в-третьих, я хотел бы показать вам весь путь по созданию драйверов векторного управления BLDC/PMSM моторами для робособаки (как и обещал, хоть это и не в той же степени актуально как раньше). Начинал я их делать с практически нулевыми познаниями в электронике. И для меня это был больше обучающий проект. Может кому-то мой опыт тоже будет полезен.
Также идет усиленная работа по самой робособаке, ее я чуток переделал (и не один раз -_-). И по нескольким другим более сложным проектам. Но пусть для вас это пока будет сюрпризом :)
Попробуем потрогать на ютюбе настоящую науку. Не знаю, как сам ютюб на это отреагирует… Но какой смысл стоять на месте?